In one of my previous blogs I compared the Galileo board against the Raspberry Pi Today we are looking at how the Galileo board compares to the affordable Beaglebone Black board. The Beaglebone is an initiative by Texas Instruments (TI). Unlike the Raspberry PI the Beaglebone board is all open source. Anyway let’s look at the key technical data:
| Beaglebone Black | Intel Galileo | |
| Target price: | US$45 | US$69 |
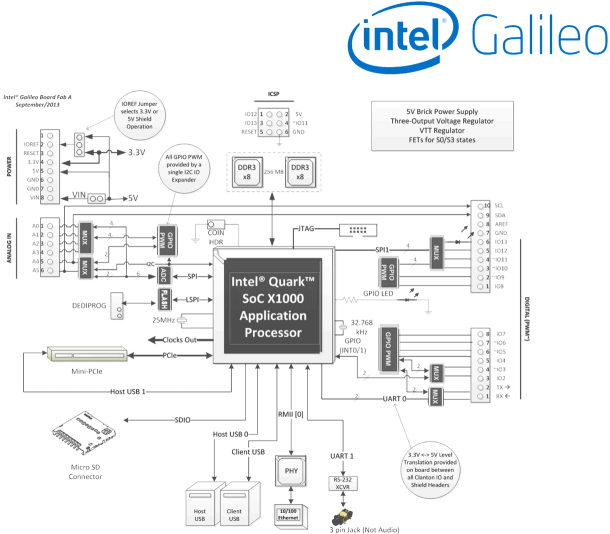
| SoC: | Texas Instruments Sitara AM3359 | Intel Quark X1000 |
| CPU: | 1GHz ARM® Cortex-A8, NEON floating-point accelerator, 2x PRU 32-bit microcontrollers | 400MHz 32-bit x86 Pentium Class CPU |
| GPU: | SGX530 3D graphics accelerator | none |
| Memory (DRAM): | 512MB DDR3 RAM | 256 Mbyte |
| PCIe ports: | none | PCIe 2.0 |
| USB 2.0 ports: | 1 Host, 1 Device |
1 Host, 2 Device |
| Video input: | none | |
| Video outputs: | HDMI (rev 1.3 & 1.4) | none |
| Audio outputs: | stereo via HDMI | none |
| Onboard storage: | 2GB 8-bit eMMC on-board flash storage SD/MMC/SDIO 3.3V card slot |
SD/MMC/SDIO 3.3V card slot |
| Onboard network: | 10/100 Ethernet | 10/100 Ethernet |
| Low-level peripherals: | Power 5V, 3.3V , VDD_ADC(1.8V) 3.3V I/O on all signals McASP0, SPI1, I2C, GPIO(69 max), LCD, GPMC, MMC1, MMC2, 7 AIN(1.8V MAX), 4 Timers, 4 Serial Ports, CAN0, EHRPWM(0,2),XDMA Interrupt, Power button, Expansion Board ID |
16 × GPIO, UART, I²C bus, SPI |
| Power ratings: | 210-460 mA @ 5V | 550 mA (1.9-2.2W) |
| Power source: | 5 Volt | 5 Volt |
| Size: | 86.36 mm x 53.34 mm (3.4 in x 2.1 in) | 106.68 mm x 71.12 mm (4.2 in x 2.8 in) |
Both boards offer pretty similar technical data. One of the main difference is the absence of a graphics engine and HDMI interfaces in the Galileo’s X1000 Quark processor. This obviously makes the Galileo less of a choice for graphics application. The Beaglebone also offers a higher CPU clock speed which will give you additional punch. However, if you need a miniPCIe slot Galileo is the way to go.
To close the triangle I also recommend the detailed comparison of the Raspberry Pi vs. the Beaglebone published in Make Magazine.