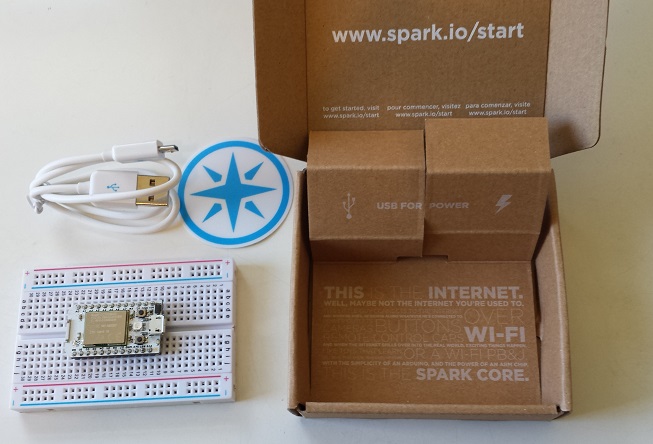
In a previous blog post I was describing an example of how a Spark Core can be used to read weather sensors. The setup was really no different from any simple Arduino Uno setup. It only demonstrated how easy it is to port Arduino Sketches to a Spark Core.
In a previous blog post I was describing an example of how a Spark Core can be used to read weather sensors. The setup was really no different from any simple Arduino Uno setup. It only demonstrated how easy it is to port Arduino Sketches to a Spark Core.
With the integrated WLAN I was interested to connect the Spark Core to the internet cloud. One of the simplest ways I found, was using Google’s Spreadsheet service. I stumbled over this idea in this Spark forum post.
Here is how it works: a Google Script is periodically reading data from the Spark Core via the RESTful Spark API and then appends the data to a Spreadsheet. The code below is a minimalistic Spark code to test the such a setup:
int variable = 1634;
void setup() {
Spark.variable("variable", &variable, INT);
}
void loop() {
variable++;
delay(5000);
}
It publishes a variable for cloud access and then increments it in regular intervals. Together with the following Google script I was able to quickly pull data from my core.
function collectData() {
var sheet = SpreadsheetApp.getActiveSheet();
var sensor = UrlFetchApp.fetch("https://api.spark.io/v1/devices/<id>7/variable?access_token=<token>");
// parse the JSON the Core API created
var sensor = JSON.parse(sensor.getContentText());
// you'll need to unescape before your parse as JSON
var sensor_result = unescape(sensor.result);
// create a time stamp
var d = new Date();
// append data to spreadsheet
sheet.appendRow([d, sensor_result]);
}
However when I setup a time trigger to run the script in regular intervals I found the setup to be very unreliable. This is discussed and documented by several Spark Users and as of this writing I have not seen a fix for this problem.
One thing to note is, that this approach is pulling data from the Spark Core rather than the core pushing them to the cloud. This has a significant flaw as we cannot put the core into standby between the measurement intervals. Therefore this solution is anyway not a good choice for low power applications.
So stay tuned, I am experimenting with a better solution that I will blog about in my next post.